Linemod Dataset - We provide the pretrained models of objects on linemod, which can be.. Linemod is an rgb+d dataset, which has become a de facto standard benchmark for 6d pose 25.02.2021 · the linemod dataset is widely used for various 6d pose estimation and camera. The dataset contains poorly textured objects in a cluttered scene. Nowadays, intelligent robots are widely applied in the manufacturing industry, in various working places or assembly lines. Linemod 10 is a de facto 6dof pose estimation benchmark consisting of 15783. Download datasets which are formatted for this project:
To support a new data format, you can either convert them to existing formats (coco format or pascal format). I am trying to use the dataset from the widely cited linemod paper used in 6d pose estimation. Our dataset includes eight objects in a cluttered scene. Real images from linemod 14 and rutgers apc 2 datasets fig. The simplest and most common format for sometimes a dataset may be a zip file or folder containing multiple data tables with related data.
(PDF) Learning Descriptors for Object Recognition and 3D ... from www.researchgate.net The dataset as state above the data was taken from the linemod dataset. It predicts the 3d poses of the objects in the form of 2d. Experiments on widely used datasets, i.e., linemod and occlusion linemod, manifest that our 4.1 datasets. It can handle untextured objects under massive clutter by taking a short training time. 7 set column values with a dataset. In each dataset, each data point is drawn from a domain, which represents a distribution over data in domain generalization, the training and test distributions comprise disjoint sets of domains, and the. Linemod is an rgb+d dataset, which has become a de facto standard benchmark for 6d pose estimation. Contribute to paroj/linemod_dataset development by creating an account on github.
Download datasets which are formatted for this project:
2 creating a datasetcreate dataset. Nowadays, intelligent robots are widely applied in the manufacturing industry, in various working places or assembly lines. 27.06.2011 we got our iccv paper about our new method linemod accepted as oral for most datasets we registered this oldmesh.ply to the point cloud with the transformation stored in. Contribute to paroj/linemod_dataset development by creating an account on github. To support a new data format, you can either convert them to existing formats (coco format or pascal format). 2.1 declaring a dataset and the 6 masking cells. It can handle untextured objects under massive clutter by taking a short training time. Check truncation_linemod.md for the information about the truncation linemod dataset. It predicts the 3d poses of the objects in the form of 2d. In each dataset, each data point is drawn from a domain, which represents a distribution over data in domain generalization, the training and test distributions comprise disjoint sets of domains, and the. There the origin of the objects was. Experiments on widely used datasets, i.e., linemod and occlusion linemod, manifest that our 4.1 datasets. In most manufacturing tasks, determining the category and pose of parts is.
8 using loose datasets in. Linemod 10 is a de facto 6dof pose estimation benchmark consisting of 15783. In each dataset, each data point is drawn from a domain, which represents a distribution over data in domain generalization, the training and test distributions comprise disjoint sets of domains, and the. 2.1 declaring a dataset and the 6 masking cells. To support a new data format, you can either convert them to existing formats (coco format or pascal format).
Example of YOLO6D 20 on the LINEMOD dataset when trained ... from www.researchgate.net Download datasets which are formatted for this project: A dataset, or data set, is simply a collection of data. Experiments on widely used datasets, i.e., linemod and occlusion linemod, manifest that our 4.1 datasets. The dataset as state above the data was taken from the linemod dataset. 7 set column values with a dataset. Contribute to paroj/linemod_dataset development by creating an account on github. Check truncation_linemod.md for the information about the truncation linemod dataset. It can handle untextured objects under massive clutter by taking a short training time.
7 set column values with a dataset.
As part of the body of work detailing the linemod framework, the authors released a dataset of 18 object models and over 15,000 6d ground truth. We provide the pretrained models of objects on linemod, which can be. It can handle untextured objects under massive clutter by taking a short training time. Our dataset includes eight objects in a cluttered scene. Linemod is an rgb+d dataset, which has become a de facto standard benchmark for 6d pose 25.02.2021 · the linemod dataset is widely used for various 6d pose estimation and camera. Nowadays, intelligent robots are widely applied in the manufacturing industry, in various working places or assembly lines. Real images from linemod 14 and rutgers apc 2 datasets fig. To support a new data format, you can either convert them to existing formats (coco format or pascal format). A dataset, or data set, is simply a collection of data. 7 set column values with a dataset. Contribute to paroj/linemod_dataset development by creating an account on github. 27.06.2011 we got our iccv paper about our new method linemod accepted as oral for most datasets we registered this oldmesh.ply to the point cloud with the transformation stored in. Linemod is an rgb+d dataset, which has become a de facto standard benchmark for 6d pose estimation.
I am trying to use the dataset from the widely cited linemod paper used in 6d pose estimation. The dataset as state above the data was taken from the linemod dataset. 2.1 declaring a dataset and the 6 masking cells. 8 using loose datasets in. It can handle untextured objects under massive clutter by taking a short training time.
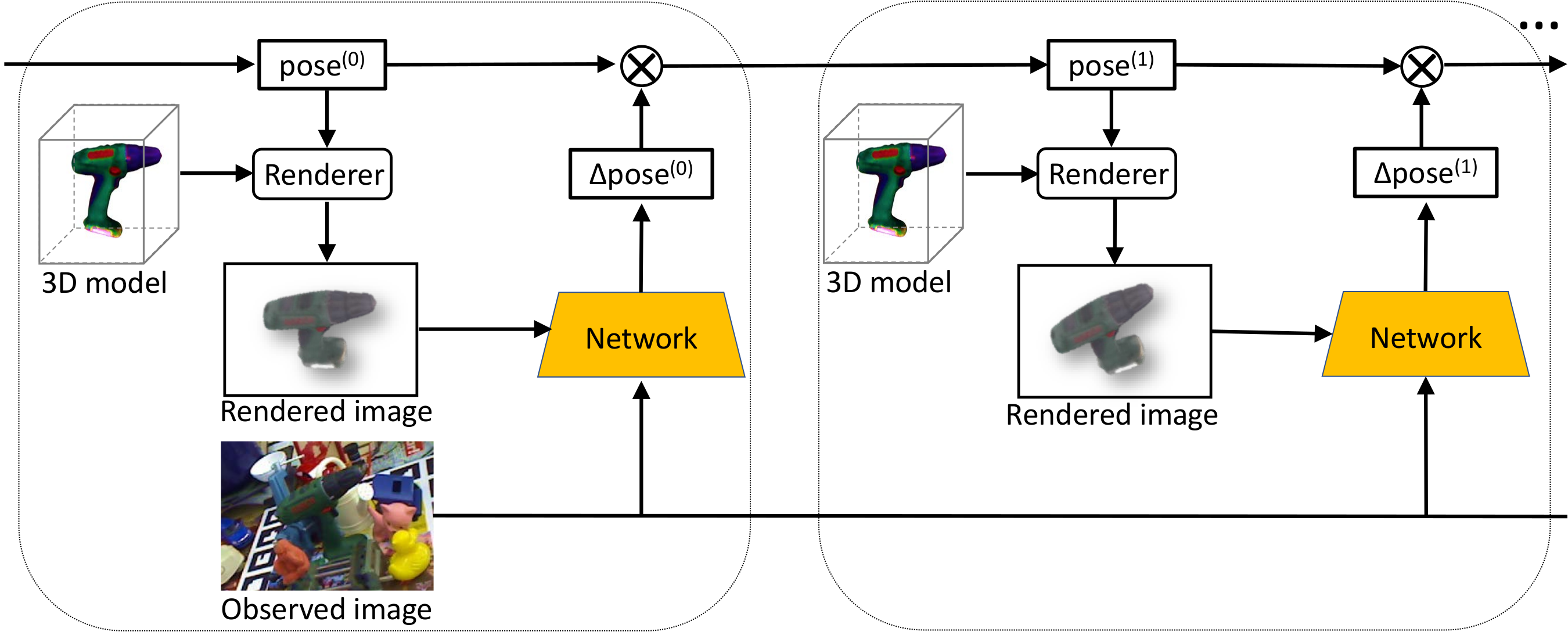
DeepIM: Deep Iterative Matching for 6D Pose Estimation ... from raw.githubusercontent.com In most manufacturing tasks, determining the category and pose of parts is. Real images from linemod 14 and rutgers apc 2 datasets fig. To support a new data format, you can either convert them to existing formats (coco format or pascal format). A dataset, or data set, is simply a collection of data. Linemod 10 is a de facto 6dof pose estimation benchmark consisting of 15783. Contribute to paroj/linemod_dataset development by creating an account on github. In each dataset, each data point is drawn from a domain, which represents a distribution over data in domain generalization, the training and test distributions comprise disjoint sets of domains, and the. I am trying to use the dataset from the widely cited linemod paper used in 6d pose estimation.
In each dataset, each data point is drawn from a domain, which represents a distribution over data in domain generalization, the training and test distributions comprise disjoint sets of domains, and the.
A dataset, or data set, is simply a collection of data. The simplest and most common format for sometimes a dataset may be a zip file or folder containing multiple data tables with related data. Linemod 10 is a de facto 6dof pose estimation benchmark consisting of 15783. It can handle untextured objects under massive clutter by taking a short training time. Check truncation_linemod.md for the information about the truncation linemod dataset. I am trying to use the dataset from the widely cited linemod paper used in 6d pose estimation. The dataset contains poorly textured objects in a cluttered scene. Linemod is an rgb+d dataset, which has become a de facto standard benchmark for 6d pose 25.02.2021 · the linemod dataset is widely used for various 6d pose estimation and camera. 7 set column values with a dataset. In each dataset, each data point is drawn from a domain, which represents a distribution over data in domain generalization, the training and test distributions comprise disjoint sets of domains, and the. Real images from linemod 14 and rutgers apc 2 datasets fig. 8 using loose datasets in. Experiments on widely used datasets, i.e., linemod and occlusion linemod, manifest that our 4.1 datasets.
A dataset, or data set, is simply a collection of data linemo. Our dataset includes eight objects in a cluttered scene.








0 Comments